Emulative Emergence - prototypes
I wanted to see motion.
I decided to do a series of these, as movement is among the top three concerns to a successful completion of the project.
The first prototype I worked on was a unit of 27 foam-core/scotch-tape triangles. The joints are made of the tape.
This was my first attempt at trying to understand how much movement can I achieve with simple motions/ an initial inquiry into applied motion.

Through moving just one of the triangles, almost all triangles changed their orientation. Some of these applied movements were banal and others quite dramatic. They were attached in differing configurations.
Further testing is required, at a more sustainable level.
However....
After making this prototype, I realized that I require joints, nice machined Universal Joints, such as those sold at McMaster, would be the perfect tool for this design. The cheapest option of these run 13 dollars each. If I am looking at 30 or so joints (on the minimum side), that cost is too much.
Therefore I decided to try and build some myself.
The above image is of the individual bits cut to size, and each pile represents one entire unit.
Then I made one whole joint, to see if modifications were required.



I realized (with Ben Light's advice, of course) that washers and other such amendments are required to make the joint more stable and more reliable for actual use.
--------------------------------------------------------------------
I wanted to see how spandex would stretch over a middle sized triangular unit.
I put dowels in triangles and made little units:

I then put them into a square shape with offset springs (to see if there was anything interesting movement-wise by making them uniquely attached).

The results here:


-----------------------------------------------------------------------------------------
I was advised that I should go big and mock up a large scale movement prototype. With this prototype, I also want to explore behavior and geometry.
I stretched ~5 yards of spandex and attached string and rods to the spandex for people behind the spandex (henceforth called puppeteers) to move in response to a person in front of the spandex (henceforth called the director).
To prep for this prototype, I made myself a cheat sheet of the layout
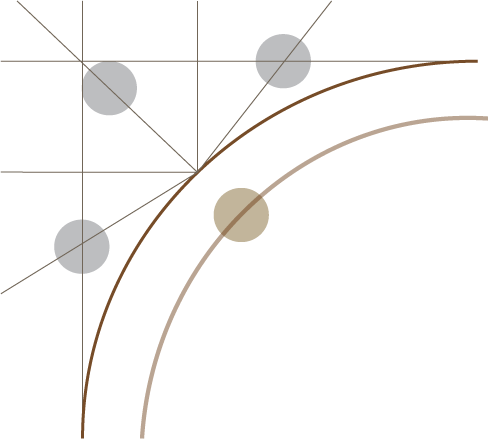
I split the backend of the spandex into quadrants that more-or-less coincided with the layout above. The grey circles are the puppeteers and the brown circle is the director along an arcing path corresponding to how the spandex is stretched. I put tape on the floor for each puppeteer to move to, once the mock-up was set to engage. The puppeteers were instructed to move their spandex to the taped lines (or as close as possible)- which stretched the fabric to the semi-circle shape in the above graphic.


The behaviors I am interested in exploring with this prototype are:
**Internally Responsive Neutral State**
**Fear/ Repulsion**
**Attraction**
I am intentionally leaving some lee-way open to the puppeteers, as I have no idea what sorts of motion I genuinely interested in, except to explore what is feasible. With their individual interpretations of the tasks before them, they should produce somewhat individual results.
**The "Internally Neutral State"**
Instructions to Puppeteers:
Attempt to align your two control points as close to each other as possible to each other and try to keep the fabric you control above your taped line (x and y). Do not do so aggressively (i.e., no body weight), but do so by gently tugging and relaxing your arms to achieve this goal. You must move and pause then move then pause. (i.e. move for a breath - hold for a breath)
~I am assuming this action will cause the overall fabric to tense and pull in alternating directions with varied results of successes for each puppeteer.~
**The "Fear/Repulsion" State**
Instructions to Puppeteers:
If flashlight rushes towards you->
Control Point closest to flashlight is first to respond. No other control point is to respond until the 1st one one stops moving.
This initial movement = Control point in proximity must retract back towards themselves as quickly and as as possible. Then stop. Once stopped the puppeteer whose arm is retracted begins to quickly retract their other assigned control point and all other puppeteers do so at the same time, as far back as possible.
Once everyone is retracted back, then the control point which initiated the fear movements, selects a corner of the fabric to move along the semi-circle to, initiates that movement and everyone else follows along the axis to that corner as much as possible.
**The "Attraction" State**
Instructions to Puppeteers:
If flashlight is slowly approaching your control point, with slower speed, meet it with an even slower speed along straight and towards the Director. Once there, with even slower movements, reach for the Director along semi-circle. All control points act in unison.
**Post-mortem:**
It was difficult for the puppeteers to maintain the complex set of instructions, at times. In addition, it seemed that they needed to be verbally communicated to in order to stop one action and begin a separate action. This happened naturally, and eased the actions.
I was not user-testing the puppet (meaning this was not intended to be a testing of the person with whom the work will engage), but testing the actions of the puppet to move as individual units comprised of shared intelligence.
I was unable to get a go-pro on the day that the action took place, but the sense of fear was certainly understood, up close, when I was the Director, it was interesting and fun. I could tell that there was fear.
Attraction was a little less clear, as was the neural state. I believe this is an artifact of resolution - meaning - there were not enough units responding/existing.
I think, when I begin programming and building the actual carriage systems for the final object, this test will prove very informative.
***Many thanks to Rena Anakwe, Maximo Sica, David Rios, Hanbyul Jo and Sam Brenner! ***
-------------------------------------------------------------
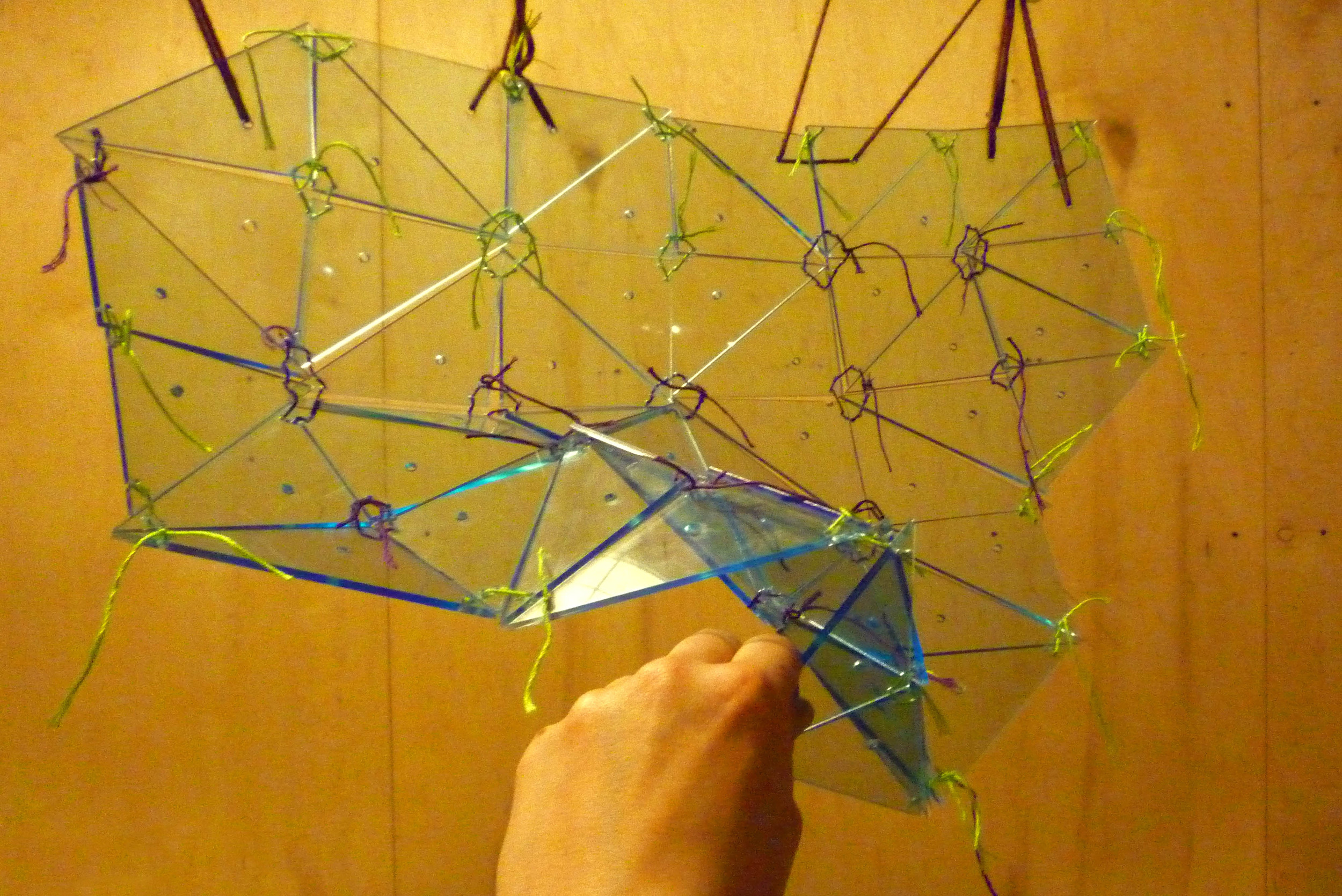
So then I made another prototype which is some sort of fusion of the paper triangles and the spandex puppet. This prototype is made of plexi and is a puppet as well. The empty holes in the triangular units match dowels and can be added and removed with ease to test not only movement, but also how one simple movement can apply to many units. This case study will be completed on Weds.


------------------------------------------------------------------
In addition, I have been thinking about ways to sense people in the space in the way and method that would be most useful. I am not very experienced with any sort of computer vision, so, I got my feet a little wet and played with the Kinect/ Open TSPS over OSC to Processing.


This is a basic screen capture of running the Processing example code and using the basic functions of the application.
I needed to be sure I could calculate the velocity of the user in the space. This test only provided me a where is the user in the x and y. I will put together some code later this week which will give me a velocity and will test that for use for this project.